揭秘!他们助航天员出舱活动“一臂之力”
齐齐哈尔时尚网小编提示,记得把"揭秘!他们助航天员出舱活动“一臂之力”"分享给大家!
最近一段时间,神舟十五号航天员正在为首次出舱活动进行任务准备。与此同时,北京航天飞行控制中心的空间站机械臂操控团队也在同步展开相应的准备工作。

为了确保航天员在机械臂的辅助下顺利执行各项舱外作业,飞控团队开展多轮桌面推演,认真检查地面仿真系统,并完善各项监控手段。
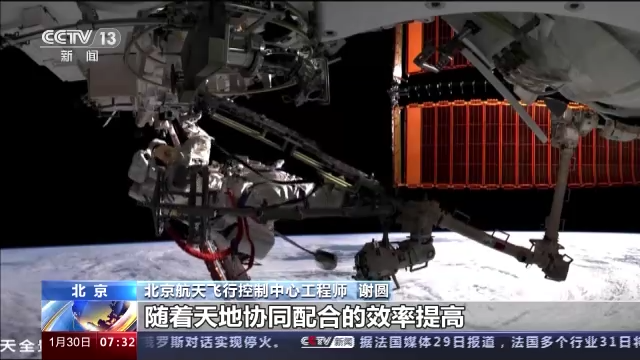
北京航天飞行控制中心工程师 谢圆:在航天员出舱的时候,我们不光要保证航天员完成工作,同时地面保障条件,包括测控条件、机械臂的配合,以及整个空间站的一个状态设置,都是需要根据航天员工作的进度来实时调整的。我们设计了一个动态的规划系统,跟着航天员出舱,实时进行天地协同的动态规划。我们也看到随着天地协同配合的效率提高,整个出舱活动的效率在提高。
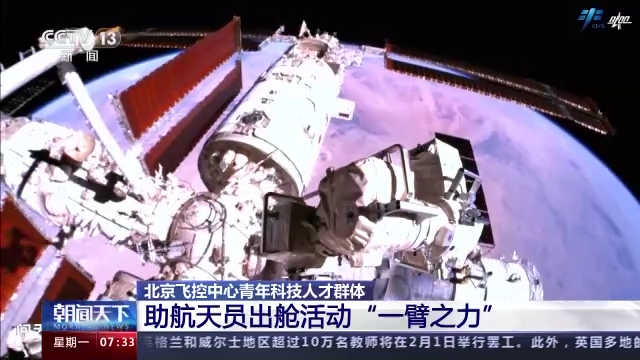
在空间站任务中,无论是航天员和货物的出舱,还是大型在轨飞行器的转位,都需要空间站机械臂一起协同开展作业。作为具有7个自由度的机器人系统,机械臂的遥操作是一个非常复杂的控制过程。
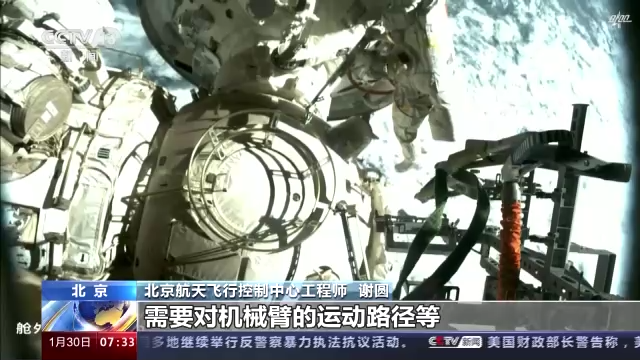
北京航天飞行控制中心工程师 谢圆:对于人机协同以及天地协同都是一个非常大的挑战。对控制精度要求是比较高的,除了在前期规划的时候需要对机械臂的运动路径等进行规划之外,我们在任务实施的时候,还对它的控制方式进行提前设计。针对这么一个多自由度的机器人系统的控制,以及它是一个在太空中工作的机器人系统的整个控制,对地面的挑战还是非常大的。

-
培养的优秀运动员张奕雯曾获世界射击冠军赛总决赛铜牌,上海市第十七届运动会获得6金5银6铜的优异成绩。培
2023-04-29 万象

-
快播:上海金山“烟花秀”五一亮相城市沙滩 警方提示:禁止攀爬观看,严禁携带无人机
4月29日(中国、墨西哥主题)和5月2日(丹麦、希腊主题),上海金山城市沙滩国际烟花秀活动将在金山城市沙
2023-04-30 万象

-
6月8日,一对新人手牵丝带等待婚礼举行。当日,一对新人身着华美汉服在山东济南千佛山风景名胜区举行婚礼,用中式婚礼
2024-06-09 万象
-
极端天气阻挡不了返程步履 春运进入返程高峰
2019-02-11 万象

-
中新社北京7月29日电 题:从“有趣”到“有感”:海外台胞青年走进美丽乡村 作者 张杨彬 “第一次吃到这么软的玉米,也
2023-07-30 万象

-
齐齐哈尔新闻网清远11月10日电 (张璐)9日,跟着《瑶族舞曲》去旅行系列活动之2024·中国南方民间说唱交流展演暨第十四届广
2024-11-11 万象

-
能率 Color Run Ⅱ上海站圆满落幕,全民健康运动盛会正式展开
2024年5月21日,能率 Color Run Ⅱ 活动上海站圆满收官,标志着这一盛事将在全国范围内陆续展开。此次活动以“FUN开跑 活
2024-05-23 万象

-
(李自曼)截至3月31日,中国平安、中国人寿、中国太保、中国人保、新华保险、中国太平6家上市险企均已披露2022年年报。如
2023-04-05 万象

-
一个妈妈的反校园暴力“战斗”:儿子被围殴,给打人者处分是底线
一个60人的班级,被分为了两个“国”。 一边是经常打人的学生,另一边是可能被打的其他同学。从一年级到三年级,云南西
2023-03-16 万象